Blog
-- Thoughts on data analysis, software
development and innovation management. Comments are welcome
Post 19
Long live the robots
29-Jul-2009
One more year, the CampusBot
gathers a huge amount of robotics enthusiasts in Valencia, as part of the CampusParty.
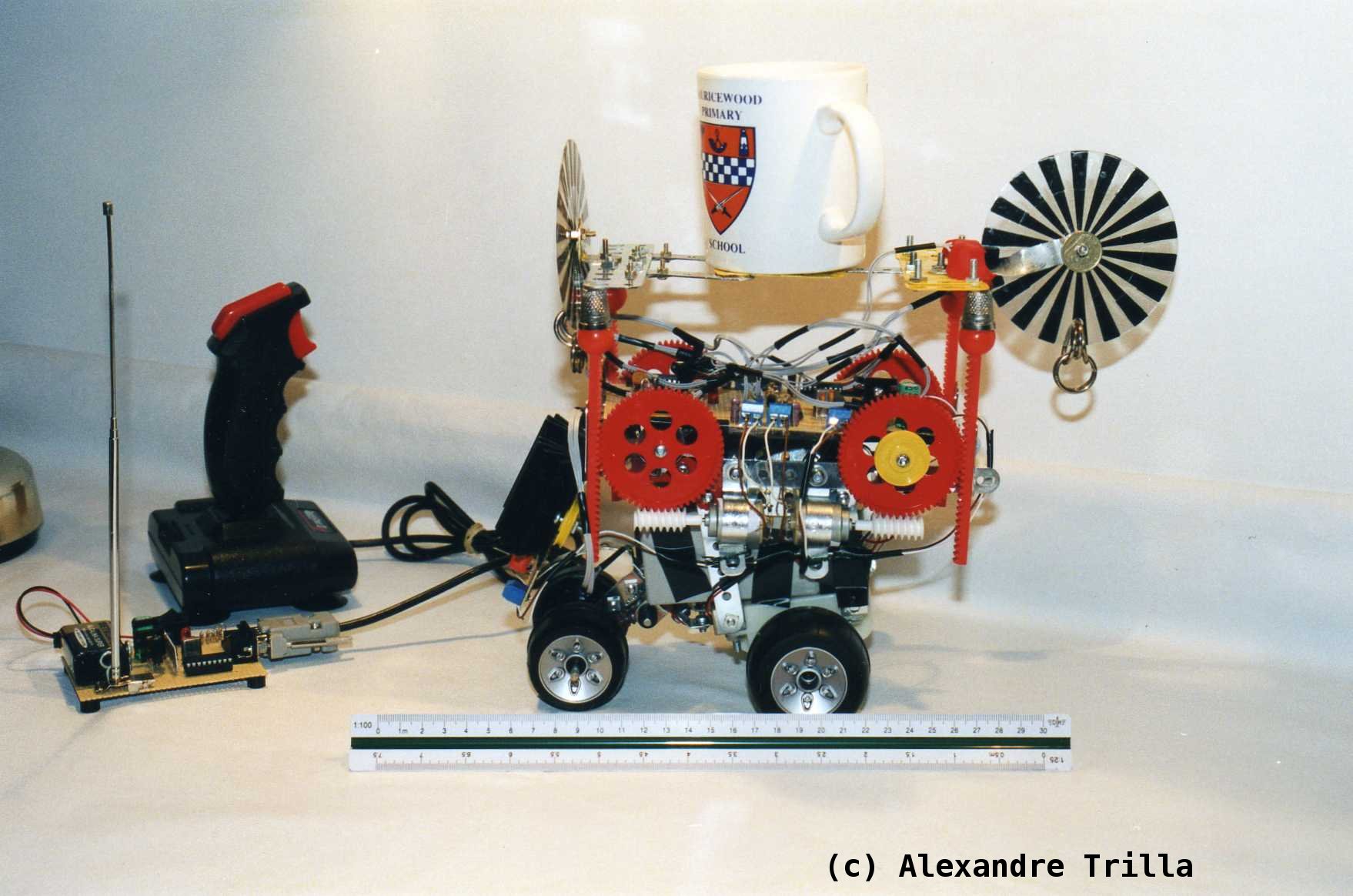
I had also once made my first approach to this field, it was my final High School project: WaiterBot.
My robot was remotely controlled with a home-made transmitter/receiver pair with a joystick and
could carry a glass of e.g. water on a tray without spilling its content. Since it had a couple
of orthogonal encoders parallel to its plane of movement it could detect the inclination of the
surface it roved and correct this angle with a set of motors and gears. Take a look at the pictures
(pic01 and
pic02)
to see what I mean.
Today I thought about that little bot I built eight years ago, it's been a quite a while.
I searched my hard drive and recovered the manuscript where the schematics and source code were
and put it in my publications space under a Creative Commons license.
Eventually that creation is freely available on the Internet.
I must say that the waiter robot served me very well in the university. Apart from the knowledge
I obtained from hacking with the PIC16F84 microcontroller, which had become very popular among the
satellite television cracking community, on my third year at university I replaced the tray device
with an ultrasound SONAR and built a RC car which stopped in case of collision danger. The ultrasound
SONAR was built with the auto-focusing device of a Polaroid camera, as indicated in the
Encoder
e-magazine from the Seattle Robotics Society. Its precision allowed the robot to stop at 62cm.
from an obstacle.
After that, looking forward to completing my Bachelor's degree I set to making a line follower. I had
to rebuild the motion mechanism because the gears had worn out. Thus, I replaced the original toy device
with a couple of hacked RC boat servo-motors, I dismantled the radio controller and finally attached
an array of infrared reflective optical sensors to autonomously drive the robot. I have had a lot of
fun with robots after all these experiences.
Nowadays there is Arduino, an open-source electronics prototyping
platform that is being used not only for robotics, but for many other applications since it has been
adopted by many different fields: from art to engineering. It merges free hardware with free software,
the best of both worlds ;) It would be great to migrate all academic programs to such open-source
frameworks so as to enable/motivate the thorough study of the systems that lay underneath, a goal
that cannot be achieved, by definition, with proprietary platforms, be either software or hardware.
|
{kind=link}
{kind=link}